NSD
NSD MRE-G160SP062FBC Multi-turn type ABSOCODER Sensor
Product Code:MRE-G160SP062FBC
Description
Shape:S[Cylinder type]Type : P[Standard]Mounting : S[Servo-mount type] F[Flange-mount type]Shaft shape : A[Flat] B[Key way]Connector type : C[Cable & connector](connector: Standard type)
System ConfigurationItemSpecificationSensor modelMRE-32SP062MRE-G?SP062Total number of turns3264128160256320Divisions/Turn409620481024819.2512409.6Total number of divisions131072(217)Mass(kg)1.51.0Linearity error(°degree)1 Max.2 Max.4 Max.5 Max.8 Max.10 Max.Moment of inertiakg?m2 {kgf?cm?s2}6.7×10-6{6.8×10-5}3.9×10-6{4.0×10-5}Starting torqueN?m{kgf?cm}4.9×10-2 {0.5} or lessPermissible shaft loadRadial(N {kgf})98{10}Thrust(N {kgf})49{5}Permissible mechanical speed3600Bearing life(h)3.0×104(at 3600 r/min)1.5×104(at 3600 r/min)Ambient temperatureOperating-20 ? +60Storage-30 ? +90Vibration resistance2.0×102m/s2 {20G} 200Hz up /down 4h, forward/back 2h, conforms to JIS D1601 standardShock resistance4.9×103m/s2 {500G} 0.5ms up/down/forward/back 3 times each, conforms to JIS C5026 standardProtection ratingIP52f(JEM1030)Max. sensor cable lengthStandard cable (m)100(4P-S)Robotic cable (m)40(4P-RBT)70(4P-RBT)Interconnecting sensor cable (m)2
Technical Specifications
- Shape:S[Cylinder type]
- Type : P[Standard]
- Mounting : S[Servo-mount type] F[Flange-mount type]
- Shaft shape : A[Flat] B[Key way]
- Connector type : C[Cable & connector](connector: Standard type)
![Mounting S[Servo-mount type] F[Flange-mount type] Option mounting SH-01 : Reinforcedservo-mount Shaft shape A[Flat] B[Key way] Connector type C[Cable & connector 1] B[Cable & connector 2] L[connector]](https://www.nsdcorp.com/product/multi_turn_sensor/mre/images/image06a.gif)
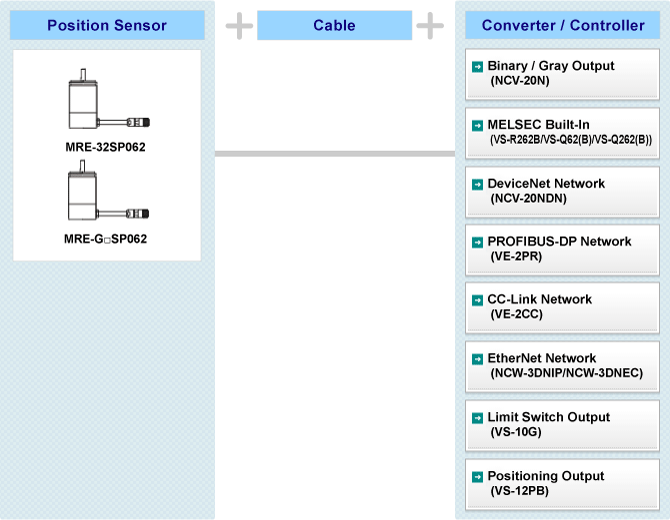
System Configuration
| Item | Specification | ||||||
|---|---|---|---|---|---|---|---|
| Sensor model | MRE-32SP062 | MRE-G?SP062 | |||||
| Total number of turns | 32 | 64 | 128 | 160 | 256 | 320 | |
| Divisions/Turn | 4096 | 2048 | 1024 | 819.2 | 512 | 409.6 | |
| Total number of divisions | 131072(217) | ||||||
| Mass(kg) | 1.5 | 1.0 | |||||
| Linearity error(°degree) | 1 Max. | 2 Max. | 4 Max. | 5 Max. | 8 Max. | 10 Max. | |
| Moment of inertia | kg?m2 {kgf?cm?s2} | 6.7×10-6{6.8×10-5} | 3.9×10-6{4.0×10-5} | ||||
| Starting torque | N?m{kgf?cm} | 4.9×10-2 {0.5} or less | |||||
| Permissible shaft load | Radial(N {kgf}) | 98{10} | |||||
| Thrust(N {kgf}) | 49{5} | ||||||
| Permissible mechanical speed | 3600 | ||||||
| Bearing life(h) | 3.0×104(at 3600 r/min) | 1.5×104(at 3600 r/min) | |||||
| Ambient temperature | Operating | -20 ? +60 | |||||
| Storage | -30 ? +90 | ||||||
| Vibration resistance | 2.0×102m/s2 {20G} 200Hz up /down 4h, forward/back 2h, conforms to JIS D1601 standard | ||||||
| Shock resistance | 4.9×103m/s2 {500G} 0.5ms up/down/forward/back 3 times each, conforms to JIS C5026 standard | ||||||
| Protection rating | IP52f(JEM1030) | ||||||
| Max. sensor cable length | Standard cable (m) | 100(4P-S) | |||||
| Robotic cable (m) | 40(4P-RBT) | 70(4P-RBT) | |||||
| Interconnecting sensor cable (m) | 2 | ||||||